![]()
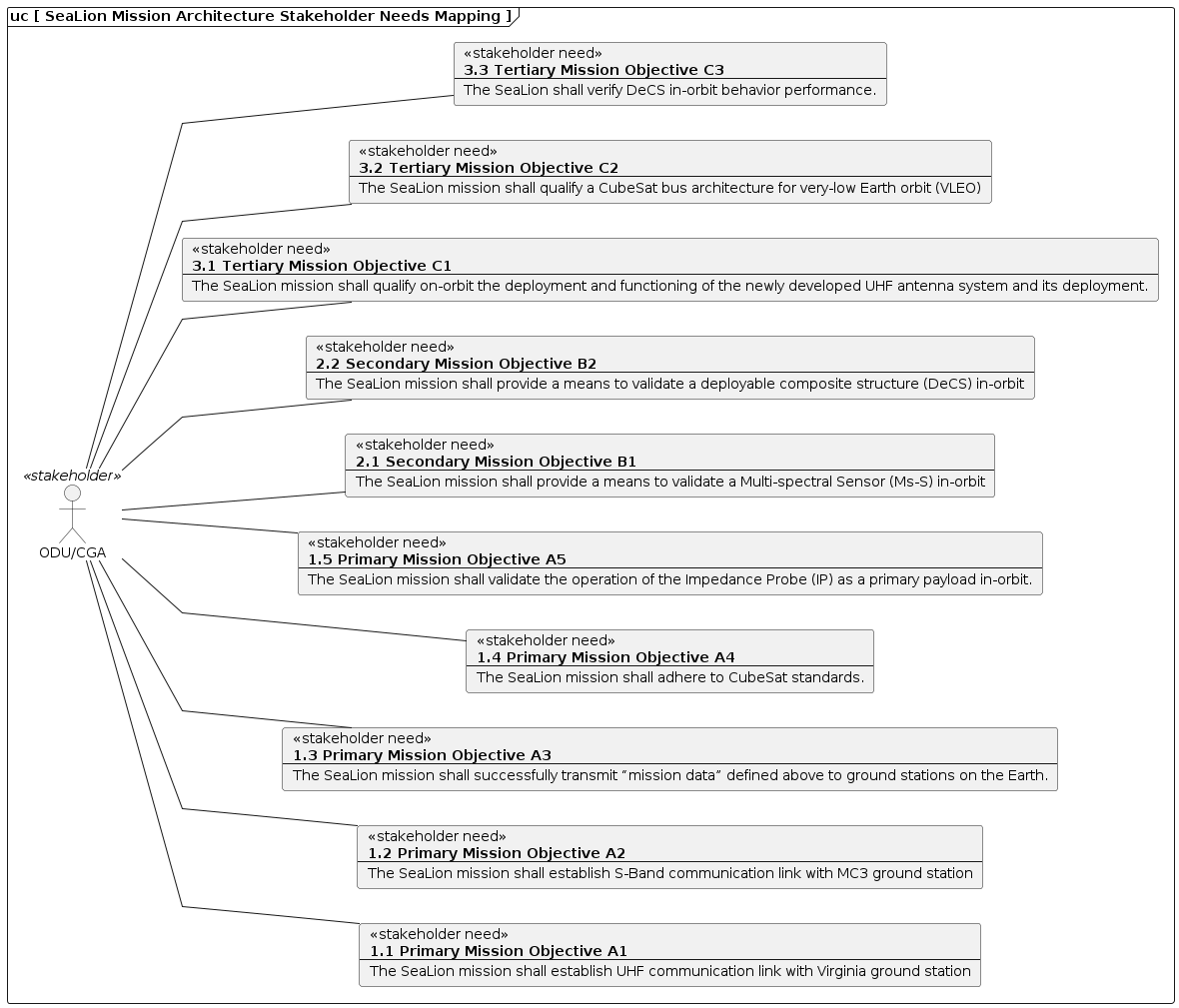
Stakeholder Needs
The SeaLion Mission Architecture is guided by a series of stakeholder needs, listed below.
1.1: Primary Mission Objective A1
1.2: Primary Mission Objective A2
1.3: Primary Mission Objective A3
1.4: Primary Mission Objective A4
Reference:
1.5: Primary Mission Objective A5
2.1: Secondary Mission Objective B1
2.2: Secondary Mission Objective B2
3.1: Tertiary Mission Objective C1
3.2: Tertiary Mission Objective C2
3.3: Tertiary Mission Objective C3
Stakeholder Needs Mapping
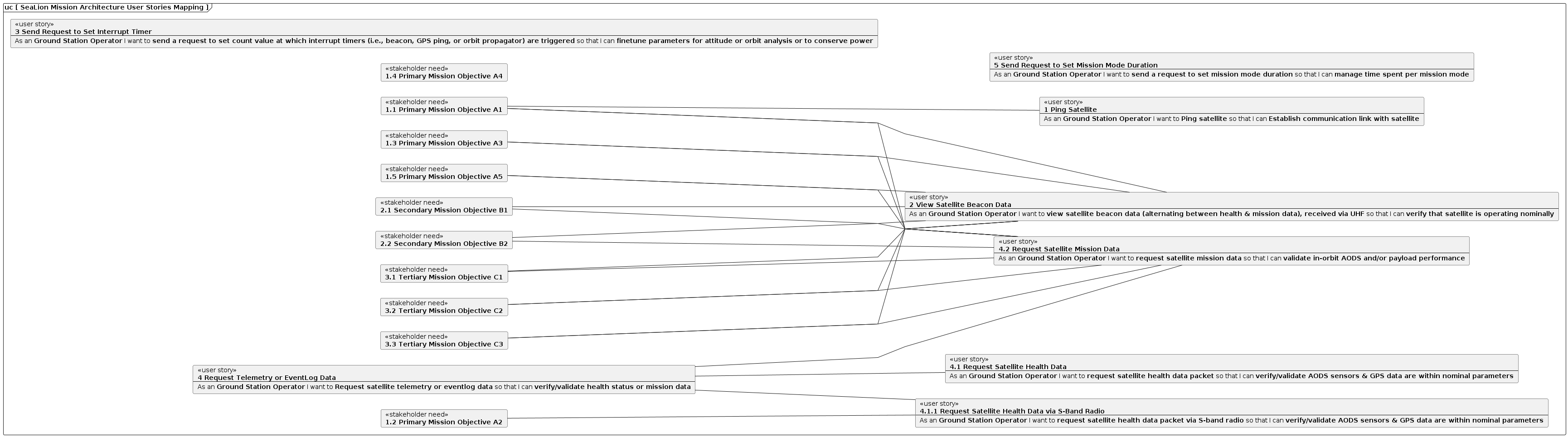
User Stories
The SeaLion Mission Architecture’s stakeholder needs are then used to identify a series of user stories which then lead to design decisions captured in data structure and activity definitions.
1: Ping Satellite
Example:
Ping the satellite in order to establish UHF communication link with Virginia ground station
Derived From:
2: View Satellite Beacon Data
Example:
View satellite beacon data (health or mission data) to verify that state vector correspond with expected orbit profile and/or to validate that a mission mode was successful
3: Send Request to Set Interrupt Timer
Example:
Update beacon rate to transmit every 30 minutes to conserve power
4: Request Telemetry or EventLog Data
Example:
Request satellite telemetry packets for local verification/validation of onboard AODS computations
4.1: Request Satellite Health Data
Example:
Request satellite health data packet to verify or validate state vector corresponding to expected orbit profile based on pre-computed orbit propagation model
Derived From:
4.1.1: Request Satellite Health Data via S-Band Radio
Example:
Request satellite health data packet via S-band radio to verify or validate state vector corresponding to expected orbit profile based on pre-computed orbit propagation model
4.2: Request Satellite Mission Data
Example:
Request satellite mission data to verify that state vector & AODS sensor data correspond with expected orbit profile and/or validate that a mission mode was successful
5: Send Request to Set Mission Mode Duration
Example:
send a request to set Mission Mode 1 duration to 25 minutes
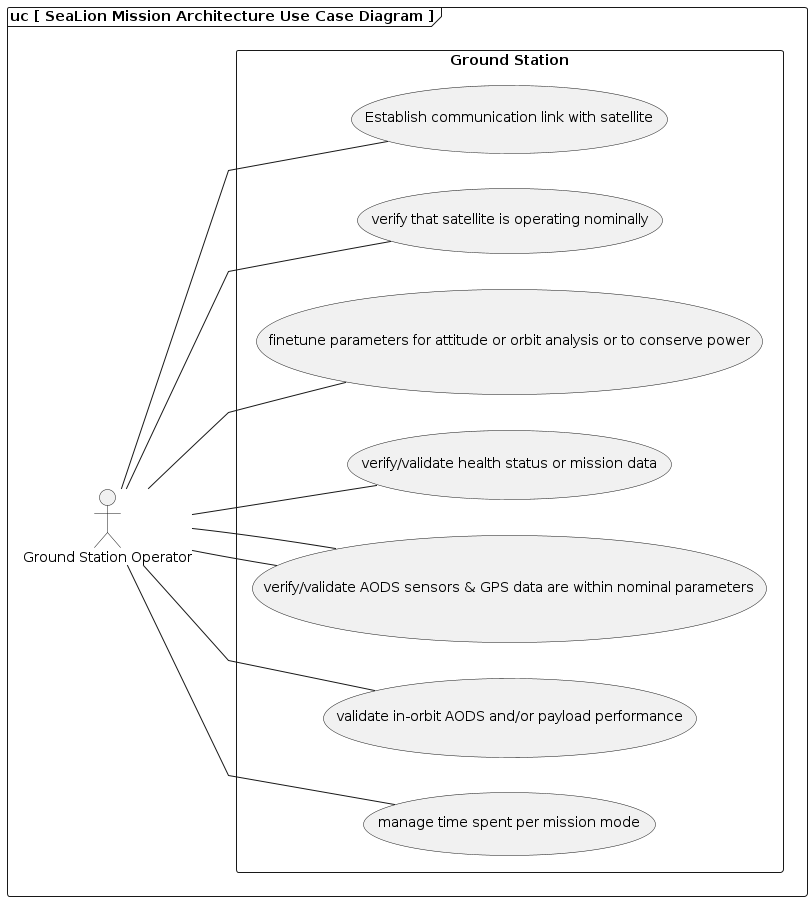
User Stories Mapping
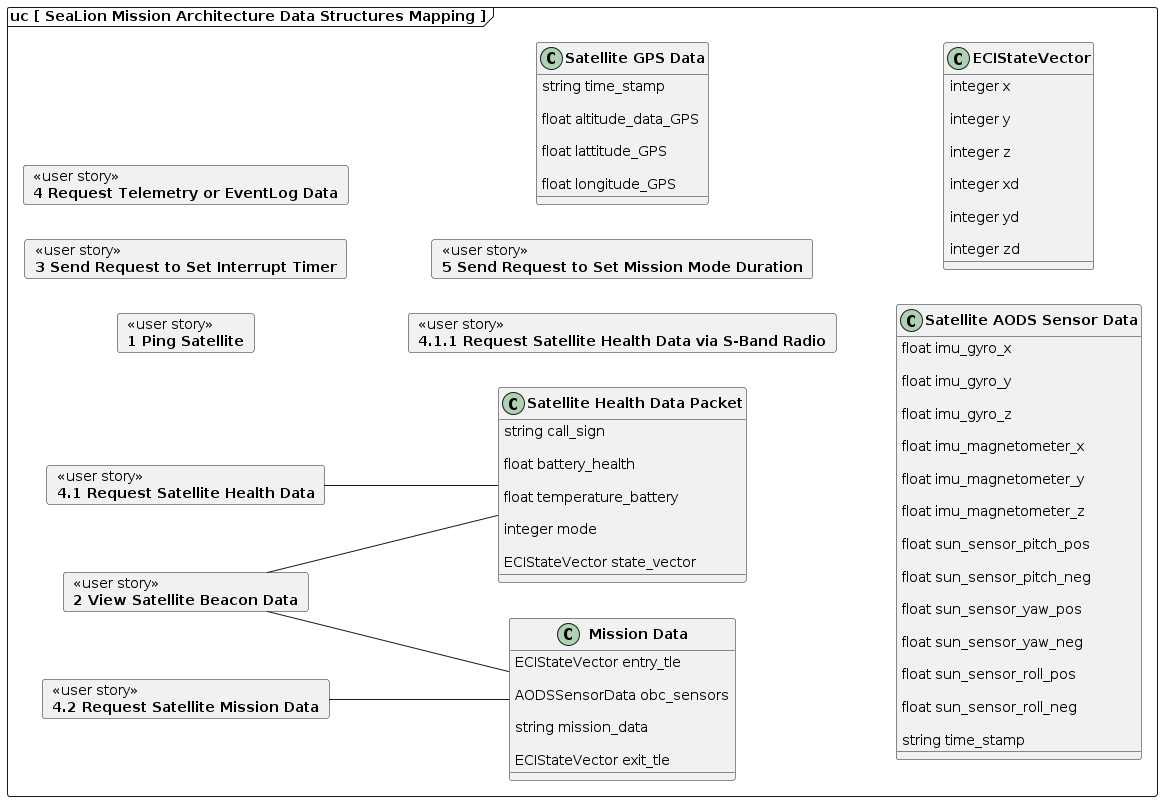
User stories as Use Case Diagram
Data Structures
This section covers each data structure type in the SeaLion Mission Architecture.
Satellite Health Data Packet
Purpose: Data structure for satellite health data packet used for beacon telemetry
call_sign: {{call_sign}}
battery_health: {{battery_health}}
temperature_battery: {{temperature_battery}}
mode: {{mode}}
state_vector: {{state_vector}}
| Field | Type | Item Type | Description | Source |
|---|---|---|---|---|
call_sign |
string |
Identifying call sign for the Sealion mission. |
||
battery_health |
float |
Percent value indicating the remaining charge of the batteries. |
||
temperature_battery |
float |
The temperature of the battery. Units in Kelvin. |
||
mode |
integer |
Integer value indicating current mission mode. 0 = Safe, 1 = mission mode 1, 2 = mission mode 2, 3 = mission mode 3. |
||
state_vector |
ECIStateVector |
ECI state vector from orbit propogator at time of beacon. |
Derived From:
Satellite GPS Data
Purpose: Data structure for GPS data used for orbit propagation
time_stamp: {{time_stamp}}
altitude_data_GPS: {{altitude_data}}
lattitude_GPS: {{lattitude}}
longitude_GPS: {{longitude}}
| Field | Type | Item Type | Description | Source |
|---|---|---|---|---|
time_stamp |
string |
Time stamp when GPS data was acquired. |
||
altitude_data_GPS |
float |
The altitude data of the satellite from GPS. |
||
lattitude_GPS |
float |
Lattitude coordinate of the satellite from GPS. |
||
longitude_GPS |
float |
Longitude coordinate of the satellite from GPS. |
Satellite AODS Sensor Data
Purpose: Data structure for satellite AODS sensor data used for attitude determination or incremental orbit propogation
imu_gyro_x: {{imu_gyro_x}}
imu_gyro_y: {{imu_gyro_y}}
imu_gyro_z: {{imu_gyro_z}}
imu_magnetometer_x: {{imu_magnetometer_x}}
imu_magnetometer_y: {{imu_magnetometer_y}}
imu_magnetometer_z: {{imu_magnetometer_z}}
sun_sensor_pitch_pos: {{sun_sensor_pitch_pos}}
sun_sensor_pitch_neg: {{sun_sensor_pitch_neg}}
sun_sensor_yaw_pos: {{sun_sensor_yaw_pos}}
sun_sensor_yaw_neg: {{sun_sensor_yaw_neg}}
sun_sensor_roll_pos: {{sun_sensor_roll_pos}}
sun_sensor_roll_neg: {{sun_sensor_roll_neg}}
time_stamp: {{time_stamp}}
| Field | Type | Item Type | Description | Source |
|---|---|---|---|---|
imu_gyro_x |
float |
The angular rate of the body with to respective to the x-axis in the IMU’s reference frame. |
||
imu_gyro_y |
float |
The angular rate of the body with to respective to the y-axis in the IMU’s reference frame. |
||
imu_gyro_z |
float |
The angular rate of the body with to respective to the z-axis in the IMU’s reference frame. |
||
imu_magnetometer_x |
float |
The magnetic field strength with respective to the x-axis in the IMU’s reference frame. |
||
imu_magnetometer_y |
float |
The magnetic field strength with respective to the y-axis in the IMU’s reference frame. |
||
imu_magnetometer_z |
float |
The magnetic field strength with respective to the z-axis in the IMU’s reference frame. |
||
sun_sensor_pitch_pos |
float |
Sun sensor measurement with respect to positive pitch angle. |
|
|
sun_sensor_pitch_neg |
float |
Sun sensor measurement with respect to negative pitch angle. |
|
|
sun_sensor_yaw_pos |
float |
Sun sensor measurement with respect to positive yaw angle. |
|
|
sun_sensor_yaw_neg |
float |
Sun sensor measurement with respect to negative yaw angle. |
|
|
sun_sensor_roll_pos |
float |
Sun sensor measurement with respect to positive roll angle. |
|
|
sun_sensor_roll_neg |
float |
Sun sensor measurement with respect to negative roll angle. |
|
|
time_stamp |
string |
Time stamp of the last transmission. |
Derived From:
ECIStateVector
Purpose: Data structure for the earth-centered inertial (ECI) state vector in cartesian coordinates computed from GPS data or orbit propagator
x: {{x}}
y: {{y}}
z: {{z}}
xd: {{xd}}
yd: {{yd}}
zd: {{zd}}
| Field | Type | Item Type | Description | Source |
|---|---|---|---|---|
x |
integer |
position in kilometers (km) along x-axis |
||
y |
integer |
position in kilometers (km) along y-axis |
||
z |
integer |
position in kilometers (km) along z-axis |
||
xd |
integer |
velocity in kilometers per second (km/s) along x-axis |
||
yd |
integer |
velocity in kilometers per second (km/s) along y-axis |
||
zd |
integer |
velocity in kilometers per second (km/s) along z-axis |
Mission Data
Purpose: Defines EVR (event) elements to be recorded to the eventLog during a mission mode
entry_tle: {{entry_tle}}
obc_sensors: {{obc_sensors}}
mission_data: {{mission_data}}
exit_tle: {{exit_tle}}
| Field | Type | Item Type | Description | Source |
|---|---|---|---|---|
entry_tle |
ECIStateVector |
ECIStateVector at time of beginning of mission mode |
||
obc_sensors |
AODSSensorData |
AODS Sensor data |
||
mission_data |
string |
Data recorded during mission mode |
||
exit_tle |
ECIStateVector |
ECIStateVector at time of end of mission mode |
Derived From:
Data Structures Mapping
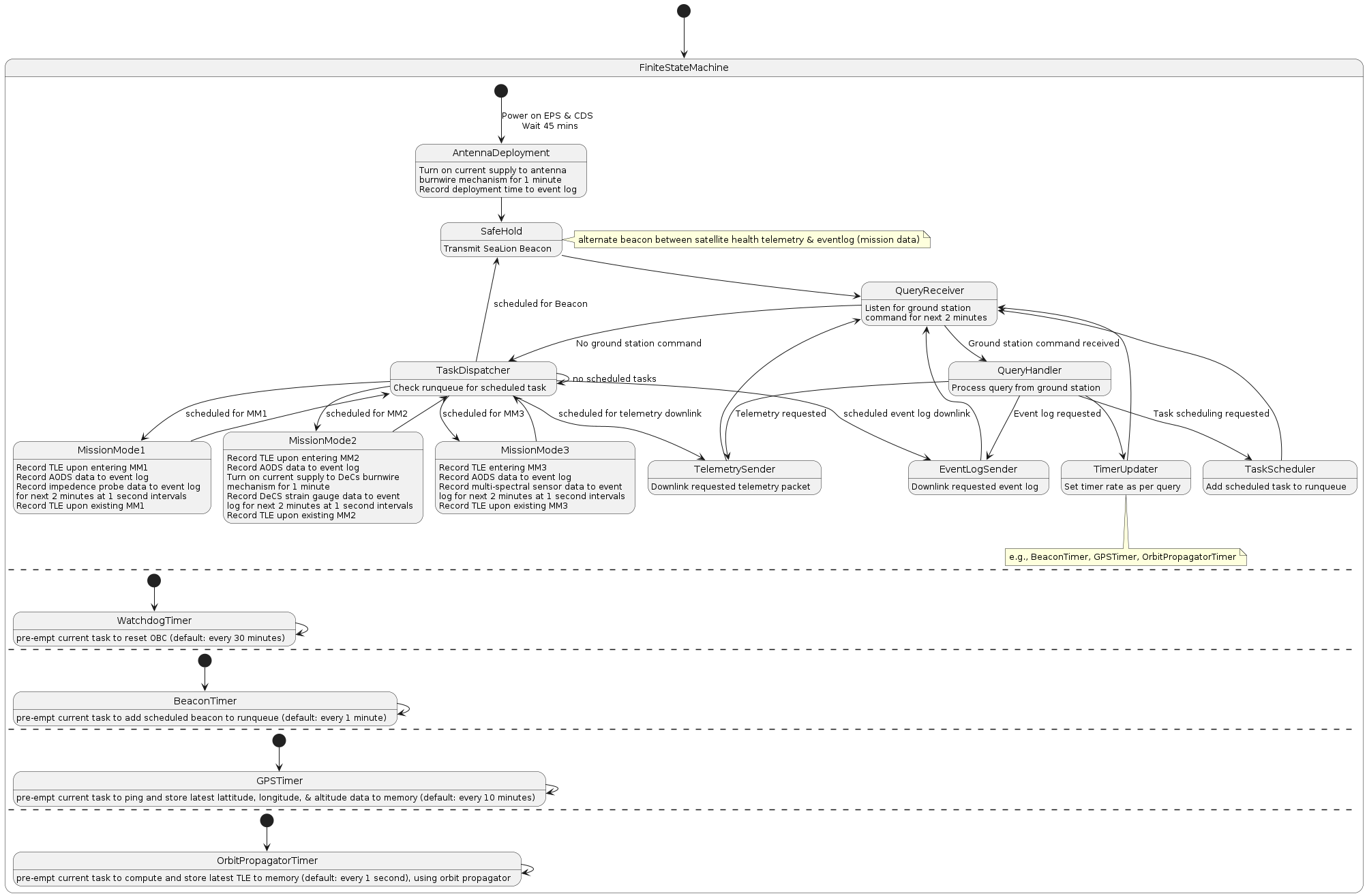
Finite State Machine